


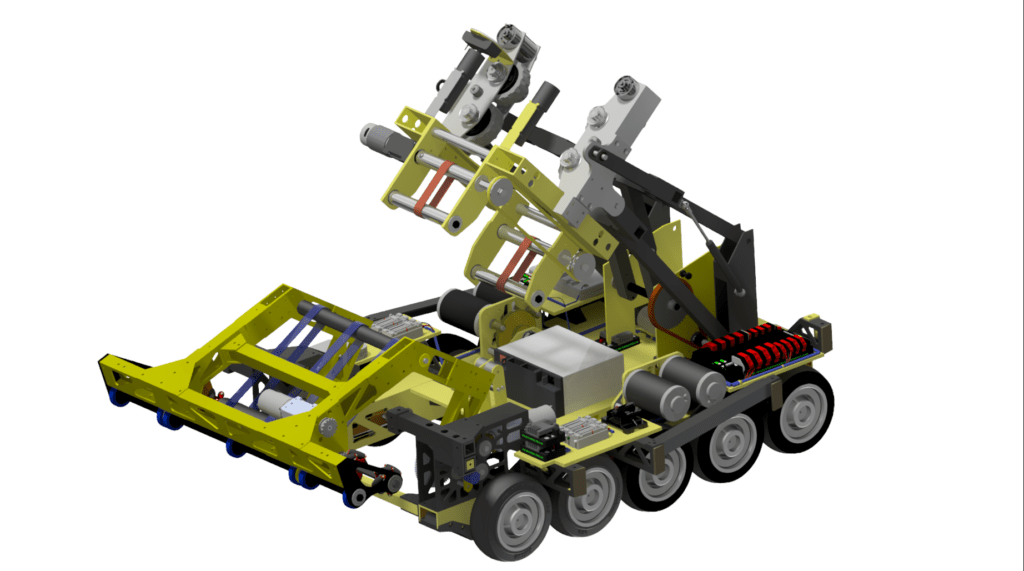








Drivetrain: This years drivetrain is a slight variation of our Funky Drive from 2014. This six-wheel drive has a slight center drop on the middle wheel, making it a west coast drive. The front wheels are omni wheels, which reduces turning resistance, and the center wheels are traction wheels, which allows for control. The drive gearbox has motors that hang over the wheels to save space for electronics on the interior. The single speed gearbox can drive the robot up to 15.5 ft/s.
Shooter: This year we tried something new with our shooter, designing a double-sided belt shooter that would pivot to shoot from different angles. From our calculations we found that a belt shooter could transfer more energy into balls while still maintaining a lower profile, when compared to the standard single flywheel hooded design. Another design requirement for the shooter was for it to be able to shoot from the two walls cornering the boiler, as to provide a location for shooting fuel safely into the high goal. We realized that a turret would need to rotate 150 degrees in order to meet this standard, so thus we designed a flip shooter that would have two positions for shooting. Such a flip shooter only needs to move ~30 degrees, ultimately taking up less space than a turret shooter.
Collector: Our collector uses belts to pick up balls from the ground and move them to the ball storage. It also serves as an elevator that lifts balls from the ball storage up to the shooter. A pair of pneumatics deploys the front of the collector outside the robot’s bumpers to collect balls before the robot runs into them.
Gear Collector: Our gear collector uses a pair of clamping surfaces to pick up gears from the ground. It uses one pair of pneumatic cylinders to raise and lower itself, and another pair to open and close the clamp. It uses a linear slide to ensure the clamps slide smoothly, as well as using special friction surfaces to grip the gear as the robot lifts it off the ground.
Climber: Our climber uses velcro to capture the ⅜” nylon rope. A slip knot in the rope allows the climber to gather enough slack before climbing. The gearbox includes a torque limiter that slips when the robot reaches the top of its climb. A ratchet on the output prevents the robot from falling down. In all, it takes around eight seconds to capture the rope and climb, with the actual climb taking four seconds.
Weight: 88 lbs
Height: 24in
Collector: Our collector is mounted at the front of our robot and uses mecanum wheels to funnel the balls in. Two sets of rollers are used to add extra range. The collector is not only used to collect balls, but can also be used to pass the Cheval de Frise by pushing down. To avoid damage to the collector gearbox, a CNC-machined, custom-made friction clutch is used on the geared side of the collector, allowing the collector arm to slip when under great load and saving our gears from damage.
Drivetrain: The drivetrain is both designed and fabricated by our all-girls subteam. It is designed to go over a variety of obstacles. The drivetrain features pneumatic wheels and a curved profile to go over the rock wall.
Shooter: To score goals, our robot has a shooter that can actuate up and down for various shots. The shooter uses four 3.25-inch diameter flywheels to shoot the ball from the outer works. Custom PCBs, designed and made in-house, are used to measure the speeds of the flywheels when we shoot. When the robot is moving around, the ball is held securely by a holder mechanism, using aluminum plates and belts to keep the ball in place while not deforming it severely. A four-bar linkage allows the shooter to pivot upwards and go to the correct angle for making the shot in a single move, eliminating the need for a seperate motor and pivot point.
Width: 26 in.
Length: 47 in.
Height: 43 in.
Weight: 92 lbs.
Drivetrain: This years drivetrain is a slight variation of our Funky Drive from 2014. This six-wheel drive has a slight center drop on the middle wheel, making it a west coast drive. The front wheels are omni wheels, which reduces turning resistance, and the center wheels are traction wheels, which allows for control. The drive gearbox has motors that hang over the wheels to save space for electronics on the interior. The single speed gearbox can drive the robot up to 15.5 ft/s.
Shooter: This year we tried something new with our shooter, designing a double-sided belt shooter that would pivot to shoot from different angles. From our calculations we found that a belt shooter could transfer more energy into balls while still maintaining a lower profile, when compared to the standard single flywheel hooded design. Another design requirement for the shooter was for it to be able to shoot from the two walls cornering the boiler, as to provide a location for shooting fuel safely into the high goal. We realized that a turret would need to rotate 150 degrees in order to meet this standard, so thus we designed a flip shooter that would have two positions for shooting. Such a flip shooter only needs to move ~30 degrees, ultimately taking up less space than a turret shooter.
Collector: Our collector uses belts to pick up balls from the ground and move them to the ball storage. It also serves as an elevator that lifts balls from the ball storage up to the shooter. A pair of pneumatics deploys the front of the collector outside the robot’s bumpers to collect balls before the robot runs into them.
Gear Collector: Our gear collector uses a pair of clamping surfaces to pick up gears from the ground. It uses one pair of pneumatic cylinders to raise and lower itself, and another pair to open and close the clamp. It uses a linear slide to ensure the clamps slide smoothly, as well as using special friction surfaces to grip the gear as the robot lifts it off the ground.
Climber: Our climber uses velcro to capture the ⅜” nylon rope. A slip knot in the rope allows the climber to gather enough slack before climbing. The gearbox includes a torque limiter that slips when the robot reaches the top of its climb. A ratchet on the output prevents the robot from falling down. In all, it takes around eight seconds to capture the rope and climb, with the actual climb taking four seconds.
Weight: 88 lbs
Height: 24in
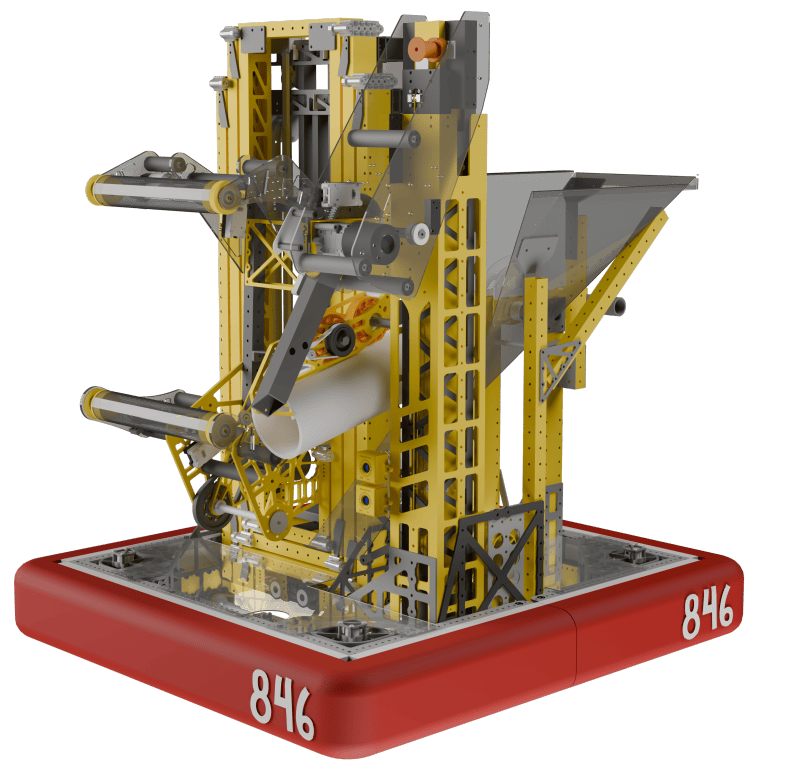
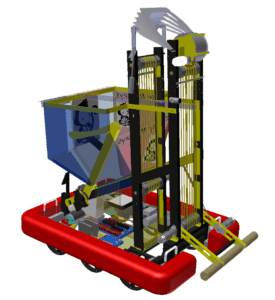
Collector: Attached near the base of the robot is the collector that intakes totes and containers into the frame of the robot. The collector can retract into transport configuration and extend for intaking. The collector features grippy wheels to quickly grab game pieces that are misaligned and align them inside the robot for stacking.
Drivetrain: The drivetrain was designed and fabricated by the all-girls sub team composed of girls from all grade levels. We decided to use a mecum drivetrain that enables the robot to move smoothly in all directions.
Arms: In order to quickly grab the containers on the center step, our robot has two carbon fiber arms with hooks at the end. The arms, which have 160 degrees of freedom, swing down and the hooks fall into the holes at the top of the containers, and the robot drives to pull the containers off the step and over the landfill.
Elevator: The elevator on the robot is used to lift and stack totes and containers inside the robot. At the base, there is a dual-motor worm gearbox to effectively drive it. There is also a negator spring that provides approximately 30 pounds of counterbalancing force to quickly lift multiple game pieces.
Carriage: In order to create stacks of totes and containers, our robot has a carriage that picks up totes. The carriage has four hooks that operate independently, allowing it to handle totes and containers of every orientation. The carriage also features an extension mechanism supported by drawer slides and powered by belts, allowing the stack to be extended out of the robot and deployed onto the various platforms or existing stacks.
Height: 77 inches
Width: 42 inches
Length: 27 inches
Weight: 119 LB
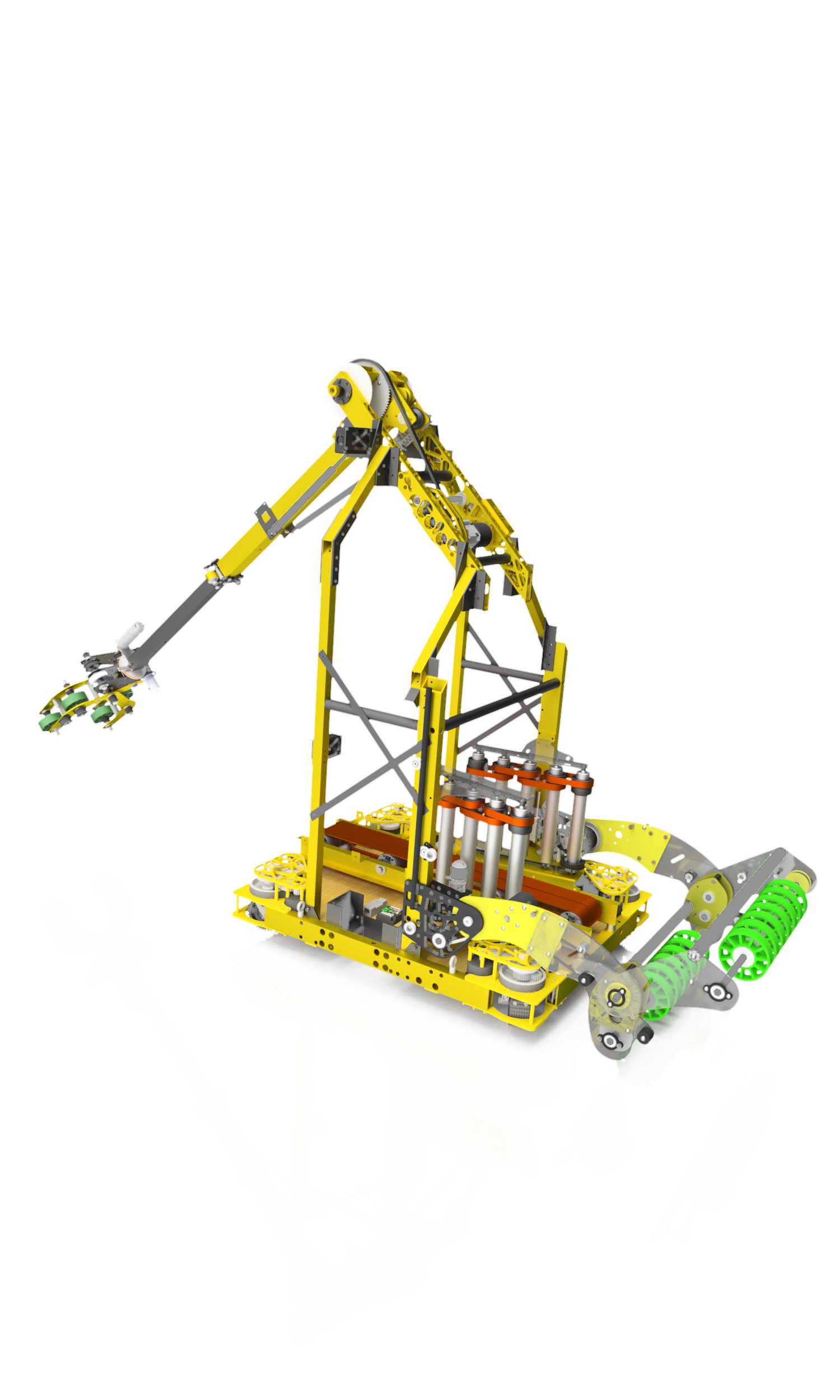
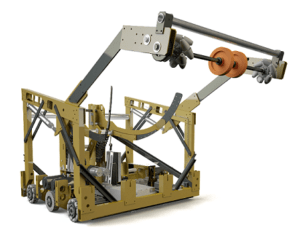
Drivetrain: 6-wheel drive (no center drop for stability when shooting). Uses "Funky Drive" wheel layout with 4 omni wheels to reduce turning resistance and 2 traction wheels for control. Features gearboxes that invert the CIMs over the wheels to save space for electronics. Designed for reliability, low maintenance, and easy fabrication: single speed of 16.3 feet/second and fixed C-C distance chain runs
Collector: Quick intake of the ball across the entire width of the robot. Mecanum wheels to funnel the ball to the center of the intake. Counterbalanced arms for quick, efficient deployment and to keep the collector in any desired position. Collector can assume an intermediate position to be clear of our shot without being at risk of damage or entanglement in other robots.
Shooter: Two large compression springs are attached to arms that cradle the ball. Shooter is reloaded and released by a multi-dimensional crank, driven by a custom worm gearbox to prevent backdrive. Two-position latch allows for long and short shots. Die springs dampen the catapult’s impact. Long "sweet spot" shot centered at 15 ft with a +- 4 ft tolerance makes for easy lineup for shooting into the high goal or over the truss to either human player. Short "sweet spot" shot centered at 4 ft with a +- 2 ft tolerance allows for layup shot into the high goal while bumped up against the low goal. Short shot is also easy to catch, can also be used to shoot over the truss to human player from close up
Autonomous: During the autonomous period, the Funk Cannon is capable of rapidly shooting two balls within 8 seconds, scoring 45 points by itself. The robot’s autonomous routine is written with an interpreted, pseudo-scripting language, allowing the drive team to quickly develop and test routines, adapting to any situation that may arise (such as goalie bots).
Maximum Height: 45.3 inches
Width: 29.5 inches
Length: 25.75 inches
Weight: 105 lbs
This robot shoots hard, like a cannon. Since we're the Funky Monkeys, we needed to get some funk into the name as well. Funk Cannon it was.
Drivetrain: 6-wheel drive (no center drop for stability when shooting). Uses "Funky Drive" wheel layout with 4 omni wheels to reduce turning resistance and 2 traction wheels for control. Features gearboxes that invert the CIMs over the wheels to save space for electronics. Designed for reliability, low maintenance, and easy fabrication: single speed of 16.3 feet/second and fixed C-C distance chain runs
Collector: Quick intake of the ball across the entire width of the robot. Mecanum wheels to funnel the ball to the center of the intake. Counterbalanced arms for quick, efficient deployment and to keep the collector in any desired position. Collector can assume an intermediate position to be clear of our shot without being at risk of damage or entanglement in other robots.
Shooter: Two large compression springs are attached to arms that cradle the ball. Shooter is reloaded and released by a multi-dimensional crank, driven by a custom worm gearbox to prevent backdrive. Two-position latch allows for long and short shots. Die springs dampen the catapult’s impact. Long "sweet spot" shot centered at 15 ft with a +- 4 ft tolerance makes for easy lineup for shooting into the high goal or over the truss to either human player. Short "sweet spot" shot centered at 4 ft with a +- 2 ft tolerance allows for layup shot into the high goal while bumped up against the low goal. Short shot is also easy to catch, can also be used to shoot over the truss to human player from close up
Autonomous: During the autonomous period, the Funk Cannon is capable of rapidly shooting two balls within 8 seconds, scoring 45 points by itself. The robot’s autonomous routine is written with an interpreted, pseudo-scripting language, allowing the drive team to quickly develop and test routines, adapting to any situation that may arise (such as goalie bots).
Maximum Height: 45.3 inches
Width: 29.5 inches
Length: 25.75 inches
Weight: 105 lbs
This robot shoots hard, like a cannon. Since we're the Funky Monkeys, we needed to get some funk into the name as well. Funk Cannon it was.Accordion Content
Drivetrain: 6-wheel Drivetrain powered by 4 CIM motors and geared down through a two-speed transmission (high gear at 15 ft/sec, low gear at 6 ft/sec). Front and rear wheels raised for epic turning performance. System includes closed-loop control software. Capable of crossing the Barrier with the help of two idler wheels.
Ball Collector: Drop down ball collector controls balls across the entire front of the robot.
Conveyor accepts balls from the floor and inbounder station. Pneumatic actuators tension belts to control ball feeding into the shooter.
Shooter: Shooter runs at over 5,000 RPM. Custom grooved roller powered by one Banebots motor. Two position hood to control trajectory. Also serves as radiator for internal flux capacitor.
Bridge Pusher (Tail): Drop down wedge with curved steel. Drive onto bridge with tail dropped down.
Control System: Closed loop control. Automatic stopping at the key. Automatic aiming towards hoop. Autonomous or manual balancing on the bridge. Uses CAN bus feature in the Jaguar electronic speed controllers.
Weight: 117 lb
Height: 54 inches
The "Tail" refers to the unique bridge pushing wedge that looks like a tail of a monkey when being used.
Collector: Our collector is mounted at the front of our robot and uses mecanum wheels to funnel the balls in. Two sets of rollers are used to add extra range. The collector is not only used to collect balls, but can also be used to pass the Cheval de Frise by pushing down. To avoid damage to the collector gearbox, a CNC-machined, custom-made friction clutch is used on the geared side of the collector, allowing the collector arm to slip when under great load and saving our gears from damage.
Drivetrain: The drivetrain is both designed and fabricated by our all-girls subteam. It is designed to go over a variety of obstacles. The drivetrain features pneumatic wheels and a curved profile to go over the rock wall.
Shooter: To score goals, our robot has a shooter that can actuate up and down for various shots. The shooter uses four 3.25-inch diameter flywheels to shoot the ball from the outer works. Custom PCBs, designed and made in-house, are used to measure the speeds of the flywheels when we shoot. When the robot is moving around, the ball is held securely by a holder mechanism, using aluminum plates and belts to keep the ball in place while not deforming it severely. A four-bar linkage allows the shooter to pivot upwards and go to the correct angle for making the shot in a single move, eliminating the need for a seperate motor and pivot point.
Width: 26 in.
Length: 47 in.
Height: 43 in.
Weight: 92 lbs.
Collector: Attached near the base of the robot is the collector that intakes totes and containers into the frame of the robot. The collector can retract into transport configuration and extend for intaking. The collector features grippy wheels to quickly grab game pieces that are misaligned and align them inside the robot for stacking.
Drivetrain: The drivetrain was designed and fabricated by the all-girls sub team composed of girls from all grade levels. We decided to use a mecum drivetrain that enables the robot to move smoothly in all directions.
Arms: In order to quickly grab the containers on the center step, our robot has two carbon fiber arms with hooks at the end. The arms, which have 160 degrees of freedom, swing down and the hooks fall into the holes at the top of the containers, and the robot drives to pull the containers off the step and over the landfill.
Elevator: The elevator on the robot is used to lift and stack totes and containers inside the robot. At the base, there is a dual-motor worm gearbox to effectively drive it. There is also a negator spring that provides approximately 30 pounds of counterbalancing force to quickly lift multiple game pieces.
Carriage: In order to create stacks of totes and containers, our robot has a carriage that picks up totes. The carriage has four hooks that operate independently, allowing it to handle totes and containers of every orientation. The carriage also features an extension mechanism supported by drawer slides and powered by belts, allowing the stack to be extended out of the robot and deployed onto the various platforms or existing stacks.
Height: 77 inches
Width: 42 inches
Length: 27 inches
Weight: 119 LB
Drivetrain: 6-wheel drive (no center drop for stability when shooting). Uses "Funky Drive" wheel layout with 4 omni wheels to reduce turning resistance and 2 traction wheels for control. Features gearboxes that invert the CIMs over the wheels to save space for electronics. Designed for reliability, low maintenance, and easy fabrication: single speed of 16.3 feet/second and fixed C-C distance chain runs
Collector: Quick intake of the ball across the entire width of the robot. Mecanum wheels to funnel the ball to the center of the intake. Counterbalanced arms for quick, efficient deployment and to keep the collector in any desired position. Collector can assume an intermediate position to be clear of our shot without being at risk of damage or entanglement in other robots.
Shooter: Two large compression springs are attached to arms that cradle the ball. Shooter is reloaded and released by a multi-dimensional crank, driven by a custom worm gearbox to prevent backdrive. Two-position latch allows for long and short shots. Die springs dampen the catapult’s impact. Long "sweet spot" shot centered at 15 ft with a +- 4 ft tolerance makes for easy lineup for shooting into the high goal or over the truss to either human player. Short "sweet spot" shot centered at 4 ft with a +- 2 ft tolerance allows for layup shot into the high goal while bumped up against the low goal. Short shot is also easy to catch, can also be used to shoot over the truss to human player from close up
Autonomous: During the autonomous period, the Funk Cannon is capable of rapidly shooting two balls within 8 seconds, scoring 45 points by itself. The robot’s autonomous routine is written with an interpreted, pseudo-scripting language, allowing the drive team to quickly develop and test routines, adapting to any situation that may arise (such as goalie bots).
Maximum Height: 45.3 inches
Width: 29.5 inches
Length: 25.75 inches
Weight: 105 lbs
This robot shoots hard, like a cannon. Since we're the Funky Monkeys, we needed to get some funk into the name as well. Funk Cannon it was.
Drivetrain: 6-wheel drive (no center drop for stability when shooting). Uses "Funky Drive" wheel layout with 4 omni wheels to reduce turning resistance and 2 traction wheels for control. Features gearboxes that invert the CIMs over the wheels to save space for electronics. Designed for reliability, low maintenance, and easy fabrication: single speed of 16.3 feet/second and fixed C-C distance chain runs
Collector: Quick intake of the ball across the entire width of the robot. Mecanum wheels to funnel the ball to the center of the intake. Counterbalanced arms for quick, efficient deployment and to keep the collector in any desired position. Collector can assume an intermediate position to be clear of our shot without being at risk of damage or entanglement in other robots.
Shooter: Two large compression springs are attached to arms that cradle the ball. Shooter is reloaded and released by a multi-dimensional crank, driven by a custom worm gearbox to prevent backdrive. Two-position latch allows for long and short shots. Die springs dampen the catapult’s impact. Long "sweet spot" shot centered at 15 ft with a +- 4 ft tolerance makes for easy lineup for shooting into the high goal or over the truss to either human player. Short "sweet spot" shot centered at 4 ft with a +- 2 ft tolerance allows for layup shot into the high goal while bumped up against the low goal. Short shot is also easy to catch, can also be used to shoot over the truss to human player from close up
Autonomous: During the autonomous period, the Funk Cannon is capable of rapidly shooting two balls within 8 seconds, scoring 45 points by itself. The robot’s autonomous routine is written with an interpreted, pseudo-scripting language, allowing the drive team to quickly develop and test routines, adapting to any situation that may arise (such as goalie bots).
Maximum Height: 45.3 inches
Width: 29.5 inches
Length: 25.75 inches
Weight: 105 lbs
This robot shoots hard, like a cannon. Since we're the Funky Monkeys, we needed to get some funk into the name as well. Funk Cannon it was.Accordion Content
Drivetrain: 8-wheel Drivetrain is powered by 4 CIM motors and geared down through a two-speed transmission (high gear at 16 ft/sec, low gear at 6 ft/sec). Front and rear wheels are raised for greater turning performance. Control system incorporates closed-loop control software.
Grabber: Grabber with dual rollers grips game pieces firmly. Grabber can manipulate the pitch of the piece through differential turning of the rollers. The grabber can possess any of the three game pieces. Movable arm can bring the grabber down to pick up game pieces from the floor or the feeder slot.
Elevator: Three-stage elevator allows the grabbing device to place game pieces on any peg on the scoring rack. Constant-force spring keeps raising and lowering forces equal. Full extension takes under a second.
Minibot: Minibot climbs the pole in 2 seconds. Hostbot alignment mechanisms allow accurate minibot placement.
Control System: Software uses the CAN bus feature in the Jaguar electronic speed controllers.
Weight: 105 lb
Height: 60 inches
The "Hand" is the game piece grabber that holds game pieces and releases them onto the racks. We named the robot after it because the Hand was so good.
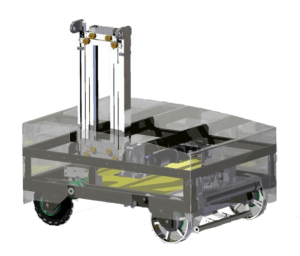
Drivetrain: 4-wheel Drivetrain is powered by 2 CIM motors and geared down using AndyMark Supershifter gearboxes (max practical speed ~10 ft/sec). It incorporates differential drive, with performance wheels in the front, omniwheels in the rear, and uses closed-loop control software for quick and controlled turning. Robot can drive over bumps and under tunnels.
Kicker: Kicker uses five torsion springs with option for six and can kick the ball 20 feet. It uses cam loading and triggering mechanism. Variable speed top roller uses an abrasive finish for friction to grip onto the ball.
Hanger: Robot uses a 4-stage lifting arm that can extend to the top of the tower to deliver hooks. It can rotate more than 90 degrees to flip the robot in case it falls on its side. Winch that elevates the robot is powered by 1 CIM motor to retract rope.
Control System: Closed-loop control.
Weight: 100 lb
Height: 36 inches
We just thought of a "cool" way to put soccer, monkeys, and robots together.
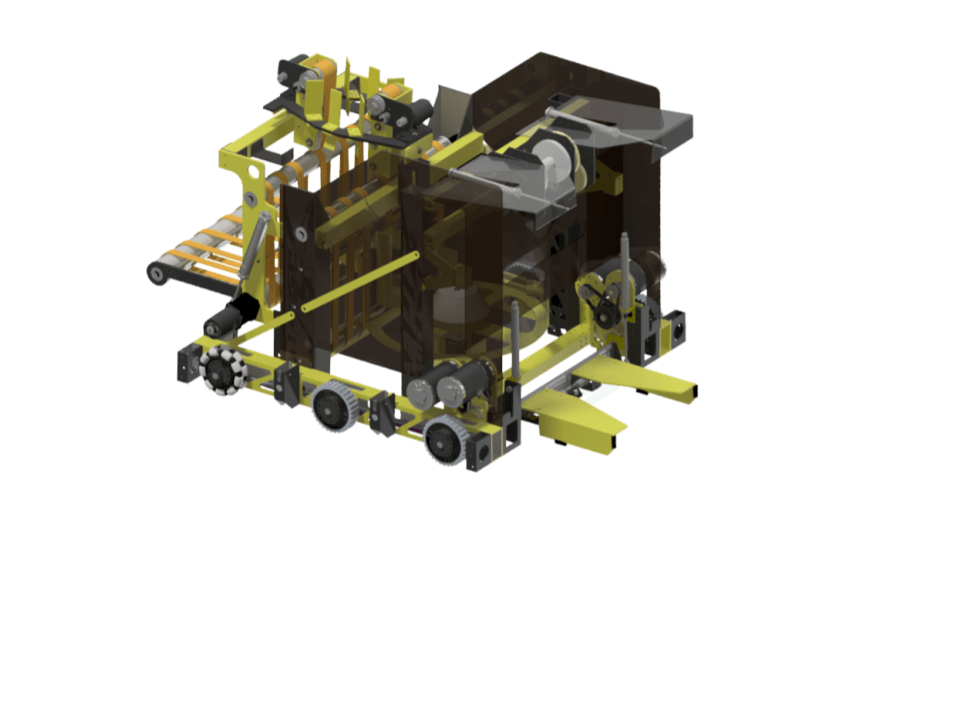
Ball Intake and Belt System - Uses 1 CIM, 2 RS-545 motors & 1 FP Motor - ABS rollers with PVC guides - 3/16" dia urethane belts (3% stretch; 3 lb tension) - Air tubing kickers to keep balls moving
Shooter - Backspin shooter launches 2 balls at a time - Range: 0 - 2.5 feet - Roughtop tread on 3" ABS tubing. Powered with a CIM motor w/ 3:1 Banebots Gearbox. Closed Loop Speed control.
Frame - Angled rear corners allow 63 degree turns with trailer. - Wide "RoadHog" layout for >40% turning torque [34" vs 24"] - Shortened 13-5/8" wheelbase for 24% lower resistance turning - Wide mouth pickup - Low open top hopper for human loading, stores over 15 balls - 4 Handles for safe, easy liftin
Software/Sensors - Optical Wheel Encoders - Custom integrating current sensors on drive motors - Dual accelerometers on left and right to monitor slip conditions - Gyro for turning stability - LCD display for on-robot diagnostics with custom Arduino (I2C comm) - AirText display with custom Arduino controller (I2C comm) - Hall Effect sensor w/ neodymium magnet for shooter speed control
Other - Angled rear corners for sharper turns - Low open top hopper for human loading, stores over 15 balls
Because the game was called Lunacy and the field simulated gravity on the moon, we cleverly named our robot "Moonkey" to sound like "monkey" but include "moon" in it.
Drivetrain –2-Speed Gearbox powered by 4 cim-motors. –4 Wheels: 2 Standard/2 Omni Wheels for smooth turns. –"Road Hog" Wide Aspect Design: 38" wide by 28" long (without bumpers). –DBS (Dither Brake Steering) for controlled turning.
Ball Handling – Lift & Fork –3 Stage Lift extends in 3 seconds. –Vacuum cup picks up trackball quickly and maintains a tight grip in traffic. –Vacuum powered by an RS-550 motor w/ a DirtDevil impeller delivers 9.5" H2O (0.35 psi) [1 atm = 14.7 psi = 760mm Hg = 33.9 feet H2O] –11 inch diameter vacuum cup pulls with up to 32 lbs! –Lift balanced with a Constant Force Neg'ator Spring Motor and powered with a single Fisher Price motor! –Pneumatic Free.
Capabilities –Hurdles by flipping trackball over the overpass from up to 4.5 feet away. –Can pick up ball on-the-fly and from a bounce. –Can grab the trackball off the overpass. –Can place trackball on overpass. –Crosses 5 quarters in Autonomous.
Sensors & Electronics –Optical Quadrature Encoders for distance control during Hybrid Period. –Gyro for measured turning control. –Automated Closed Loop Control for fork and lift motion (potentiometer sensors). –LCD Display for on-board diagnostics. –Operator Hats with integrated LEDs for visual game cues.
A howler is a type of monkey that makes really loud noises, like this robot's vacuum.
Drivetrain: 6-wheel Drivetrain powered by 4 CIM motors and geared down through a two-speed transmission (high gear at 15 ft/sec, low gear at 6 ft/sec). Front and rear wheels raised for epic turning performance. System includes closed-loop control software. Capable of crossing the Barrier with the help of two idler wheels.
Ball Collector: Drop down ball collector controls balls across the entire front of the robot.
Conveyor accepts balls from the floor and inbounder station. Pneumatic actuators tension belts to control ball feeding into the shooter.
Shooter: Shooter runs at over 5,000 RPM. Custom grooved roller powered by one Banebots motor. Two position hood to control trajectory. Also serves as radiator for internal flux capacitor.
Bridge Pusher (Tail): Drop down wedge with curved steel. Drive onto bridge with tail dropped down.
Control System: Closed loop control. Automatic stopping at the key. Automatic aiming towards hoop. Autonomous or manual balancing on the bridge. Uses CAN bus feature in the Jaguar electronic speed controllers.
Weight: 117 lb
Height: 54 inches
The "Tail" refers to the unique bridge pushing wedge that looks like a tail of a monkey when being used.
Drivetrain: 8-wheel Drivetrain is powered by 4 CIM motors and geared down through a two-speed transmission (high gear at 16 ft/sec, low gear at 6 ft/sec). Front and rear wheels are raised for greater turning performance. Control system incorporates closed-loop control software.
Grabber: Grabber with dual rollers grips game pieces firmly. Grabber can manipulate the pitch of the piece through differential turning of the rollers. The grabber can possess any of the three game pieces. Movable arm can bring the grabber down to pick up game pieces from the floor or the feeder slot.
Elevator: Three-stage elevator allows the grabbing device to place game pieces on any peg on the scoring rack. Constant-force spring keeps raising and lowering forces equal. Full extension takes under a second.
Minibot: Minibot climbs the pole in 2 seconds. Hostbot alignment mechanisms allow accurate minibot placement.
Control System: Software uses the CAN bus feature in the Jaguar electronic speed controllers.
Weight: 105 lb
Height: 60 inches
The "Hand" is the game piece grabber that holds game pieces and releases them onto the racks. We named the robot after it because the Hand was so good.
Drivetrain: 4-wheel Drivetrain is powered by 2 CIM motors and geared down using AndyMark Supershifter gearboxes (max practical speed ~10 ft/sec). It incorporates differential drive, with performance wheels in the front, omniwheels in the rear, and uses closed-loop control software for quick and controlled turning. Robot can drive over bumps and under tunnels.
Kicker: Kicker uses five torsion springs with option for six and can kick the ball 20 feet. It uses cam loading and triggering mechanism. Variable speed top roller uses an abrasive finish for friction to grip onto the ball.
Hanger: Robot uses a 4-stage lifting arm that can extend to the top of the tower to deliver hooks. It can rotate more than 90 degrees to flip the robot in case it falls on its side. Winch that elevates the robot is powered by 1 CIM motor to retract rope.
Control System: Closed-loop control.
Weight: 100 lb
Height: 36 inches
We just thought of a "cool" way to put soccer, monkeys, and robots together.
Ball Intake and Belt System - Uses 1 CIM, 2 RS-545 motors & 1 FP Motor - ABS rollers with PVC guides - 3/16" dia urethane belts (3% stretch; 3 lb tension) - Air tubing kickers to keep balls moving
Shooter - Backspin shooter launches 2 balls at a time - Range: 0 - 2.5 feet - Roughtop tread on 3" ABS tubing. Powered with a CIM motor w/ 3:1 Banebots Gearbox. Closed Loop Speed control.
Frame - Angled rear corners allow 63 degree turns with trailer. - Wide "RoadHog" layout for >40% turning torque [34" vs 24"] - Shortened 13-5/8" wheelbase for 24% lower resistance turning - Wide mouth pickup - Low open top hopper for human loading, stores over 15 balls - 4 Handles for safe, easy liftin
Software/Sensors - Optical Wheel Encoders - Custom integrating current sensors on drive motors - Dual accelerometers on left and right to monitor slip conditions - Gyro for turning stability - LCD display for on-robot diagnostics with custom Arduino (I2C comm) - AirText display with custom Arduino controller (I2C comm) - Hall Effect sensor w/ neodymium magnet for shooter speed control
Other - Angled rear corners for sharper turns - Low open top hopper for human loading, stores over 15 balls
Because the game was called Lunacy and the field simulated gravity on the moon, we cleverly named our robot "Moonkey" to sound like "monkey" but include "moon" in it.
Drivetrain - 6 Wheel Center Dropped - 2 CIMs Total, Single Speed Gearbox - Z-Squared Arcade or Tank Steering; EEPROM Selectable from OI
Ringer Handling - 3 Stage Lift with Surgical Tubing counterbalance - Pneumatic powered claw to grab and score ringers
Autonomous - Tracks down a middle level spider foot and scores a keeper - Autonomous parameters set using EEPROM from Operator Interface - Only Robot at Silicon Valley Regional to place a ringer - One of two robots at Lone Star to place ringers with >50% success.
Capabilities - Two foldout 12" Ramps for endgame bonus points
Sensors & Electronics - Optical Encoders on wheels - 10x turn pot to sense lift posision - 2 Sharp optical Distance Sensors for placing ringer autonomously - 16 LED diagnostic display (Serial based comm)
Special Features The Spidermonkey was the only robot at both Silicon Valley and the Lone Star Regional that could do all of the following: - score autonomously - place ringers on all levels - pickup ringers from the ground - lift robots - drive up the ramps of alliance robots
Spidermonkeys are monkeys with very long arms and legs, and the foldout ramps made it look like a spider with long legs.
Drivetrain - 6 Wheel Center Dropped Drivetrain; 4 CIMs - Two speed custom transmission - Tank or Arcade z-squared steering
Ball Handling - Ball pick-ups on front and back for easy Ball collection. - Wide conveyor belts with cambered rollers - Rotating Turret to shoot balls into upper goal
Capabilities - Can go up ramps for bonus points
Sensors & Electronics - Optical Encoders on Wheels - Sharp Optical Distance Sensors for ball detection within robot. - Hall Effect sensors on shooter for speed control.
Special Features - Kit CMU Camera used to control turret to track the goal. - Camera also used to set shooter speed based on elevation of the target.
Escargo looked like a snail and it held balls, like a cargo.
Drivetrain - Two CIM motors; 6 wheel drive, front and rear wheels raised for better turning. - 2 Speed custom transmission - Differential steering
Autonomous - Knocked down hanging tetra; Moved starting tetra to goal and waited. - Autonomous mode set by dip switches on robot - Autonomous objective set with thumbwheel switch on robot
Sensors - Optical Encoders on Wheels - 2 Pots on forearm and upperarm - Optical limit switches
Special Features - Operator interface had matching control arm, allowing robot arm to mirror the operators control arm.
Triple Play involves tetras, and Tetrabot held tetras.
Drivetrain - CIM+FP Motor on each side; 4 wheel with 4 additional lifting wheels. - Tank Steering
Autonomous - Knocked balls off Tee every time - Autonomous objective set with thumbwheel switch on robot
Sensors - Optical Sensor to detect lines on floor - Optical Wheel Encoders - Pots on front and rear wheel elevators
Special Features - Fiberglass rod coiled inside rim of a bicycle wheel extends to reach pull up bar. - Climbs steps autonomously.
Bikebot uniquely uses a bike wheel to reach the pull up bar.
Drivetrain –2-Speed Gearbox powered by 4 cim-motors. –4 Wheels: 2 Standard/2 Omni Wheels for smooth turns. –"Road Hog" Wide Aspect Design: 38" wide by 28" long (without bumpers). –DBS (Dither Brake Steering) for controlled turning.
Ball Handling – Lift & Fork –3 Stage Lift extends in 3 seconds. –Vacuum cup picks up trackball quickly and maintains a tight grip in traffic. –Vacuum powered by an RS-550 motor w/ a DirtDevil impeller delivers 9.5" H2O (0.35 psi) [1 atm = 14.7 psi = 760mm Hg = 33.9 feet H2O] –11 inch diameter vacuum cup pulls with up to 32 lbs! –Lift balanced with a Constant Force Neg'ator Spring Motor and powered with a single Fisher Price motor! –Pneumatic Free.
Capabilities –Hurdles by flipping trackball over the overpass from up to 4.5 feet away. –Can pick up ball on-the-fly and from a bounce. –Can grab the trackball off the overpass. –Can place trackball on overpass. –Crosses 5 quarters in Autonomous.
Sensors & Electronics –Optical Quadrature Encoders for distance control during Hybrid Period. –Gyro for measured turning control. –Automated Closed Loop Control for fork and lift motion (potentiometer sensors). –LCD Display for on-board diagnostics. –Operator Hats with integrated LEDs for visual game cues.
A howler is a type of monkey that makes really loud noises, like this robot's vacuum.
Drivetrain - 6 Wheel Center Dropped - 2 CIMs Total, Single Speed Gearbox - Z-Squared Arcade or Tank Steering; EEPROM Selectable from OI
Ringer Handling - 3 Stage Lift with Surgical Tubing counterbalance - Pneumatic powered claw to grab and score ringers
Autonomous - Tracks down a middle level spider foot and scores a keeper - Autonomous parameters set using EEPROM from Operator Interface - Only Robot at Silicon Valley Regional to place a ringer - One of two robots at Lone Star to place ringers with >50% success.
Capabilities - Two foldout 12" Ramps for endgame bonus points
Sensors & Electronics - Optical Encoders on wheels - 10x turn pot to sense lift posision - 2 Sharp optical Distance Sensors for placing ringer autonomously - 16 LED diagnostic display (Serial based comm)
Special Features The Spidermonkey was the only robot at both Silicon Valley and the Lone Star Regional that could do all of the following: - score autonomously - place ringers on all levels - pickup ringers from the ground - lift robots - drive up the ramps of alliance robots
Spidermonkeys are monkeys with very long arms and legs, and the foldout ramps made it look like a spider with long legs.
Drivetrain - 6 Wheel Center Dropped Drivetrain; 4 CIMs - Two speed custom transmission - Tank or Arcade z-squared steering
Ball Handling - Ball pick-ups on front and back for easy Ball collection. - Wide conveyor belts with cambered rollers - Rotating Turret to shoot balls into upper goal
Capabilities - Can go up ramps for bonus points
Sensors & Electronics - Optical Encoders on Wheels - Sharp Optical Distance Sensors for ball detection within robot. - Hall Effect sensors on shooter for speed control.
Special Features - Kit CMU Camera used to control turret to track the goal. - Camera also used to set shooter speed based on elevation of the target.
Escargo looked like a snail and it held balls, like a cargo.
Drivetrain - Two CIM motors; 6 wheel drive, front and rear wheels raised for better turning. - 2 Speed custom transmission - Differential steering
Autonomous - Knocked down hanging tetra; Moved starting tetra to goal and waited. - Autonomous mode set by dip switches on robot - Autonomous objective set with thumbwheel switch on robot
Sensors - Optical Encoders on Wheels - 2 Pots on forearm and upperarm - Optical limit switches
Special Features - Operator interface had matching control arm, allowing robot arm to mirror the operators control arm.
Triple Play involves tetras, and Tetrabot held tetras.
Drivetrain - CIM+FP Motor on each side; 4 wheel with 4 additional lifting wheels. - Tank Steering
Autonomous - Knocked balls off Tee every time - Autonomous objective set with thumbwheel switch on robot
Sensors - Optical Sensor to detect lines on floor - Optical Wheel Encoders - Pots on front and rear wheel elevators
Special Features - Fiberglass rod coiled inside rim of a bicycle wheel extends to reach pull up bar. - Climbs steps autonomously.
Bikebot uniquely uses a bike wheel to reach the pull up bar.